Nach der Veröffentlichung des Projektthemas fingen wir unverzüglich damit an, in Skizzen unsere Ideen und Einfälle festzuhalten.
Um effizient zu arbeiten, haben wir uns in kleineren Gruppen je einem Themengiet gewidmet und in regelmäßig stattfindenen Meetings der ganzen Gruppe den aktuellen Entwicklungsfortschritt berichtet.
Neben organisatorischer Aufgaben konnte die Entwicklung des Displays in drei Themengebiete unterteilt werden:
Mechanik und Design
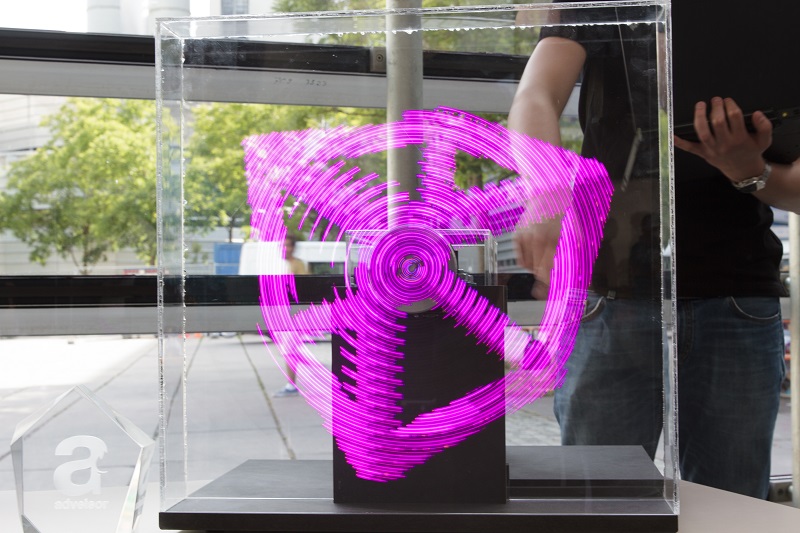
 Ziel der mechanischen Realisierung war primär die Umsetzung der Rotationsbewegung.
Der Aufbau besteht aus drei Komponeten, dem Grundgestell, dem Rotor und einem Berstschutz.
Das Grundgestell sollte für die Optik kompakt gestaltet sein, jedoch musste auf die Stabilität und die Vibrationsanfälligkeit geachtet werden, da selbst bei kleinsten Schwingungen ein Bild auf dem Display nicht mehr erkennbar gewesen wäre.
Dem Massenmittelpunkt des Rotors kam daher große Aufmerksamkeit entgegen, wobei das Erreichen einer präzisen Auswuchtung im Vordergrund stand.
Ziel der mechanischen Realisierung war primär die Umsetzung der Rotationsbewegung.
Der Aufbau besteht aus drei Komponeten, dem Grundgestell, dem Rotor und einem Berstschutz.
Das Grundgestell sollte für die Optik kompakt gestaltet sein, jedoch musste auf die Stabilität und die Vibrationsanfälligkeit geachtet werden, da selbst bei kleinsten Schwingungen ein Bild auf dem Display nicht mehr erkennbar gewesen wäre.
Dem Massenmittelpunkt des Rotors kam daher große Aufmerksamkeit entgegen, wobei das Erreichen einer präzisen Auswuchtung im Vordergrund stand.
Der Fokus bei der Betrachtung des Displays sollte ausschließlich auf dem projezierten Bild liegen. Daher haben wir uns für ein stilvoll in schwarz gehaltenens Grundgestell entschieden, welches mit einem Plexiglas-Berstschutz umhüllt wurde, da das Konstrukt ungehindert betrachtet werden sollte, aber die Sicherheit gewährleistet sein sollte.
Elektronik
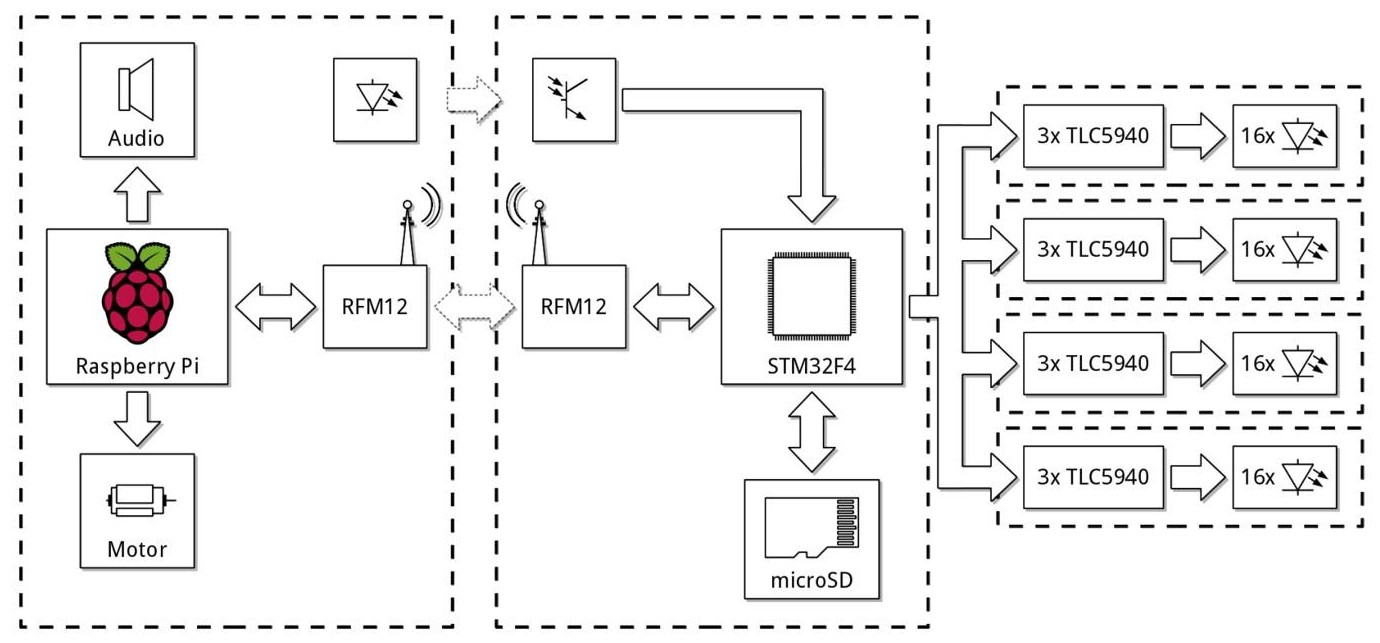 Der statische Teil im Grundgestell sowie die am Rotor befestige Hauptplatine mit den vier Rotorblättern bilden das Grundmodell des elektrischen Themengebiets.
In dem statischen Teil befindet sich neben den Komponenten der Energieversorgung ein Raspberry-PI, der für die zentrale Steuerung des Displays verantwortlich ist.
Dieser übermittelt die vom Anwender kommenden Befehle an die Hauptplatine, die die einzelnen LED's auf den Rotorblättern ansteuert und kann die Motordrehzahl steuern oder eine Audioausgabe für das Abspielen von Videos übernehmen.
Die Animationsdaten befinden sich auf einem Speichermedium auf der Hauptplatine, die individuell während des Betriebs durch den Raspberry-PI mit weiteren Animationen beschrieben werden kann.
Der Mikrocontroller passt seine Timingfrequenz individuell durch einen IR-LED-Sensor pro Umdrehung an die Drehzahl des Motors an.
Die Rotorblätter bestehen je aus 16 RGB-LED's, welche pro Blatt durch vier LED-Controller angesteuert werden.
Ein stufenweiser Versatz jedes Rotorblattes minimiert den Realisierungsaufwand der Rotorblattplatinen bei gleichzeitiger Optimierung der Pixeldichte des Displays.
Die Energieübertragung vom Stator zum Rotor geschieht über einfache Schleifkontakte.
Der statische Teil im Grundgestell sowie die am Rotor befestige Hauptplatine mit den vier Rotorblättern bilden das Grundmodell des elektrischen Themengebiets.
In dem statischen Teil befindet sich neben den Komponenten der Energieversorgung ein Raspberry-PI, der für die zentrale Steuerung des Displays verantwortlich ist.
Dieser übermittelt die vom Anwender kommenden Befehle an die Hauptplatine, die die einzelnen LED's auf den Rotorblättern ansteuert und kann die Motordrehzahl steuern oder eine Audioausgabe für das Abspielen von Videos übernehmen.
Die Animationsdaten befinden sich auf einem Speichermedium auf der Hauptplatine, die individuell während des Betriebs durch den Raspberry-PI mit weiteren Animationen beschrieben werden kann.
Der Mikrocontroller passt seine Timingfrequenz individuell durch einen IR-LED-Sensor pro Umdrehung an die Drehzahl des Motors an.
Die Rotorblätter bestehen je aus 16 RGB-LED's, welche pro Blatt durch vier LED-Controller angesteuert werden.
Ein stufenweiser Versatz jedes Rotorblattes minimiert den Realisierungsaufwand der Rotorblattplatinen bei gleichzeitiger Optimierung der Pixeldichte des Displays.
Die Energieübertragung vom Stator zum Rotor geschieht über einfache Schleifkontakte.
Programmierung
 Programmieraufgaben sind nicht nur in der Erstellung einer Benutzeroberfläche zur einfachen Bedienung des Displays enthalten, sondern auch in der Vorverarbeitung der Animationsdaten oder der Konfiguration des Mikrocontrollers.
Die Vorverarbeitung der Animationsdaten beinhaltet die Umrechnung der Frames der Animationensdaten durch Interpolation der kartesischen Pixelkoordinaten in Polarkoordinaten sowie die Erstellung von effizienten und konsistenten Bild- sowie Videodateien in selbst deklarierte Dateiformate.
Programmieraufgaben sind nicht nur in der Erstellung einer Benutzeroberfläche zur einfachen Bedienung des Displays enthalten, sondern auch in der Vorverarbeitung der Animationsdaten oder der Konfiguration des Mikrocontrollers.
Die Vorverarbeitung der Animationsdaten beinhaltet die Umrechnung der Frames der Animationensdaten durch Interpolation der kartesischen Pixelkoordinaten in Polarkoordinaten sowie die Erstellung von effizienten und konsistenten Bild- sowie Videodateien in selbst deklarierte Dateiformate.